
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
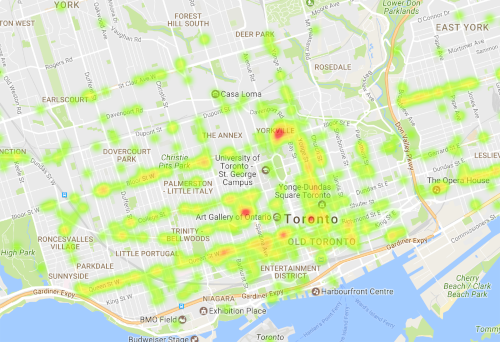
HCI principle: Gulf of Evaluation in wild
Published:
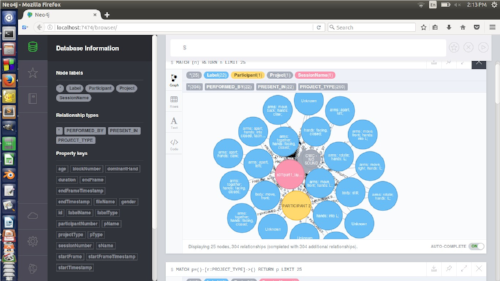
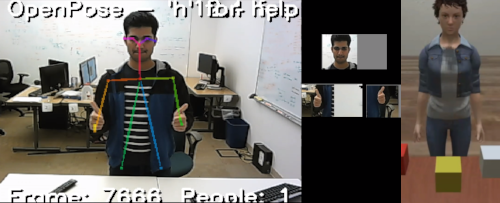
A short intro to EGGNOG dataset
Published:
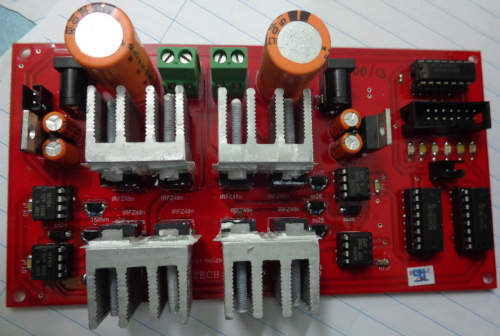
Once I dissected a MAXON motor (well, not entirely but only encoder part, but even that was not recommended!)
Published:
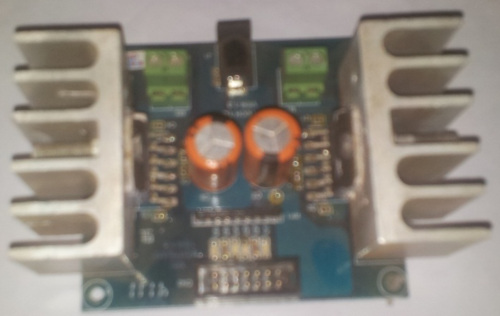
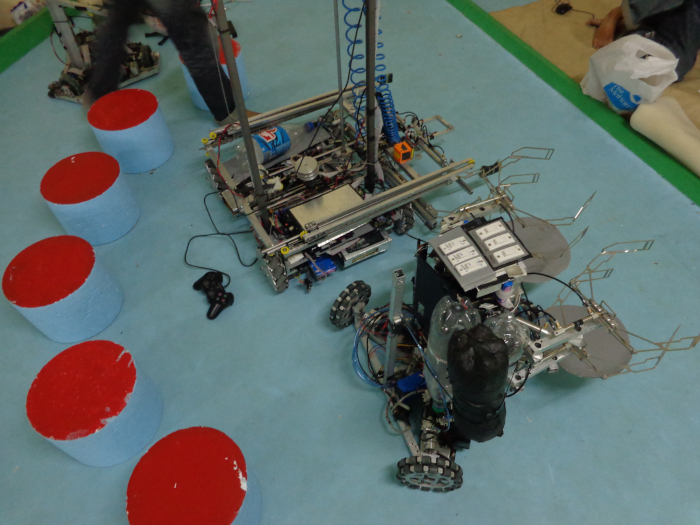
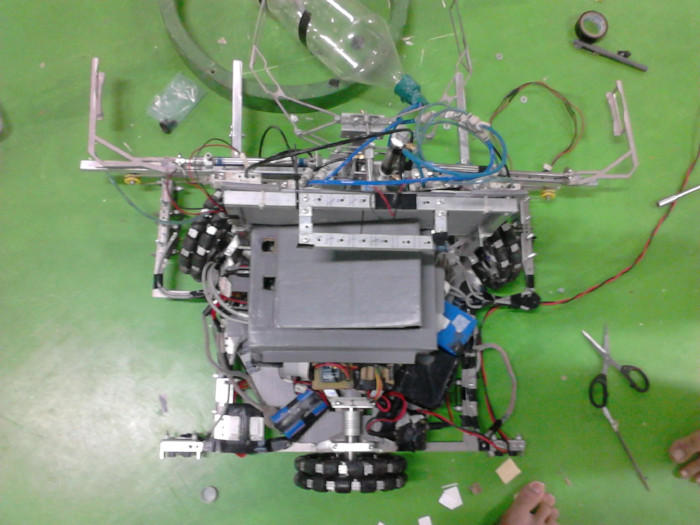
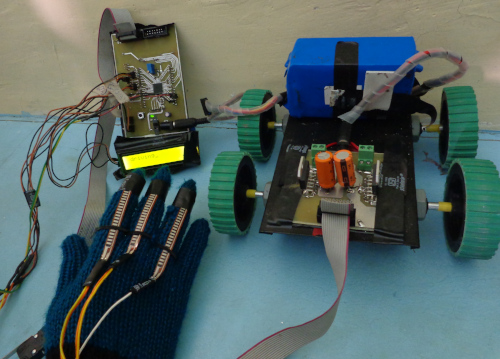
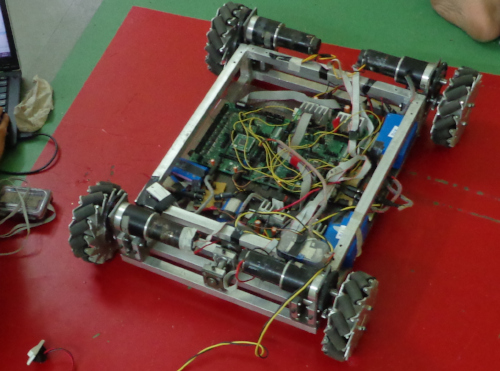
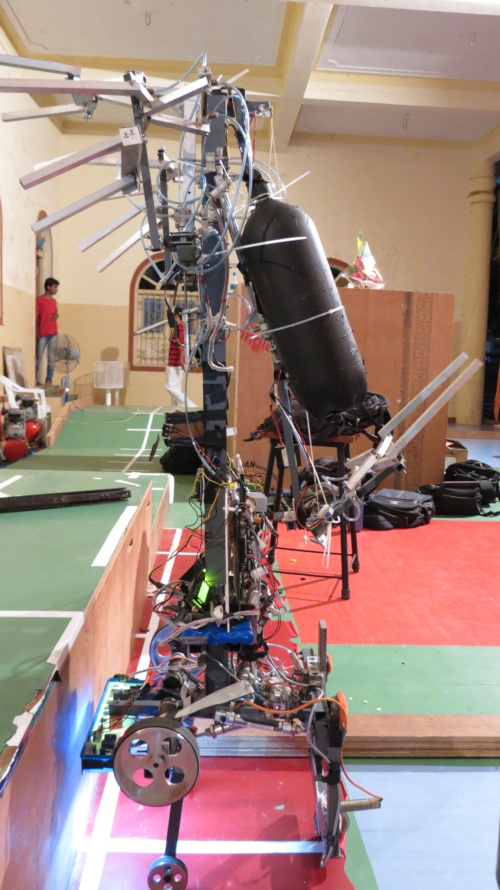
Premise: Robotics team that I am a part of uses lots of different types of DC, BLDC, servo, and stepper motors. For example, we use wiper motors for high torque applications, DC Maxon motors for fault tolerant applications that need both high speeds (high RPM) and high torques. We also use low-end, economic motors (I do not know their names but they look like this) for prototyping purpose and places on Robots where efficiency and accuracy is not critical, for instance, for a extendable arm. Sometimes, we use BLDC for the applications where speed is critical such as propelling a robot. Stepper motors are used to get finer control over the motion derived from the motor's rotation. Servos are must where extreme torques are required. For example, a robotic jaw that grabs on to objects for significantly longer amounts of time. Servo motors gives a great control over precise angular motions.
datascience
A Study of Evolution of Code Snippets on StackOverflow
![]()
Image via http://empirical-software.engineering/blog/sotorrent
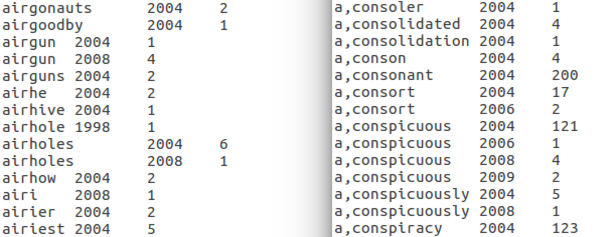
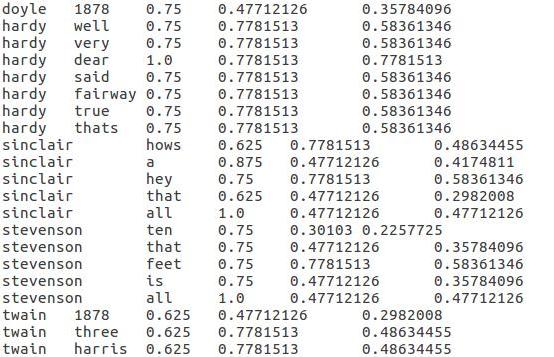
Hadoop MapReduce: Word Count & Creating N-gram Profile for the English Literature (Gutenberg) Corpus

electronics
gallery


me
My Favourite Music
Published:
My Bucketlist
Published:
misc

portfolio
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 1
Published in Journal 4, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
robotics
talks
Talk 1 on Relevant Topic in Your Field
Published:
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.


{kind=link}