High Power DC Motor Driver using Bootstrap Motor Driver ICs
I designed the layout of this high-power MOSFET Motor Driver that drives 2 motors independently. The original configuration of this circuit was developed by my teammates Bhairav Shah and Harshal Kalyane in 2011. The main goal was to build a highly robust and highly reliable DC motor driver that yielded currents over 15 Amperes continuously at 24V DC voltage. During Robocon 2012, this driver drove a 23 Kg (50 lbs), semi-automatic Robot that carried a person weighing 70 Kg (155 lbs). The circuit was build with a MOSFET driver IC that worked on the concept of bootstrapping. I spend several weeks on improving and revising the board that ended up with several version of the board. I had to obey some of the strict high-power PCB circuit design rules to avoid issues such as crosstalk, impedance mismatch, and electromagnetic interference/noise due to motor and its high currents. This design turned out to be very reliable and never failed during its deployment in actual one-on-one matches against other teams/robots. Even after 5 years when this motor driver was first introduced, I feel extremely passionate and nostalgic about it. This project will always be in the top-5 favourite projects of mine.


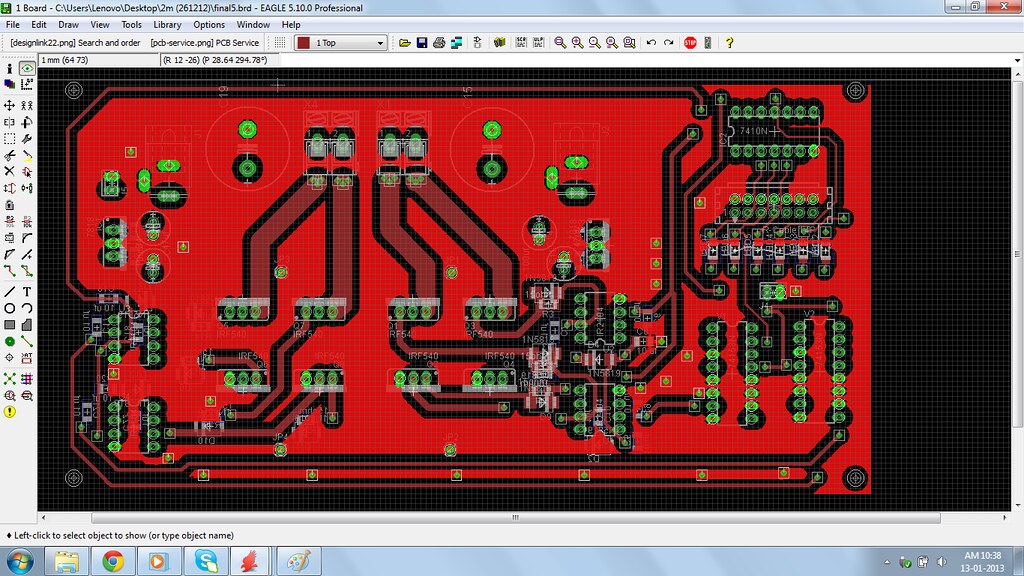
Routing in progress using EAGLE PCB design software:

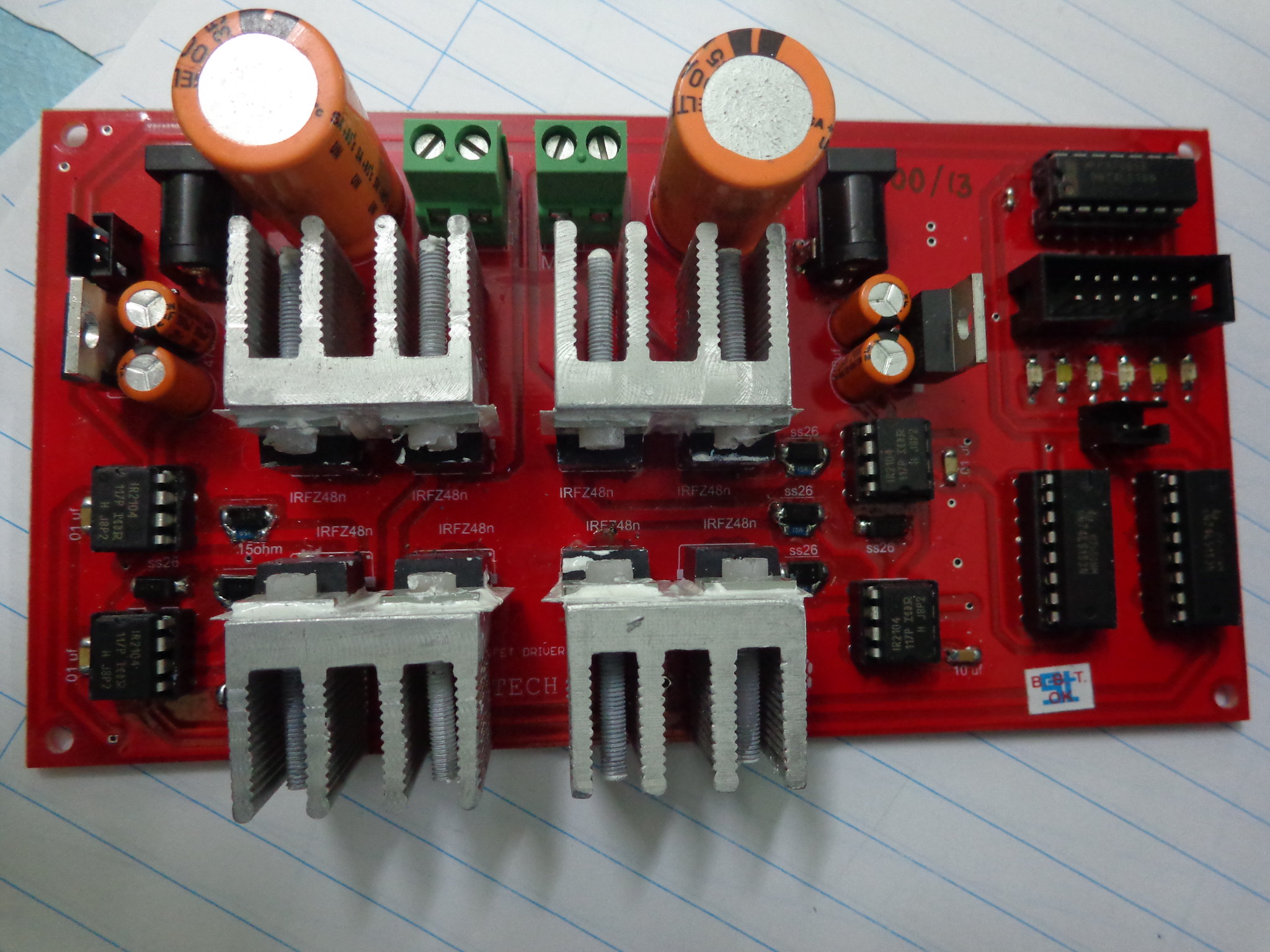
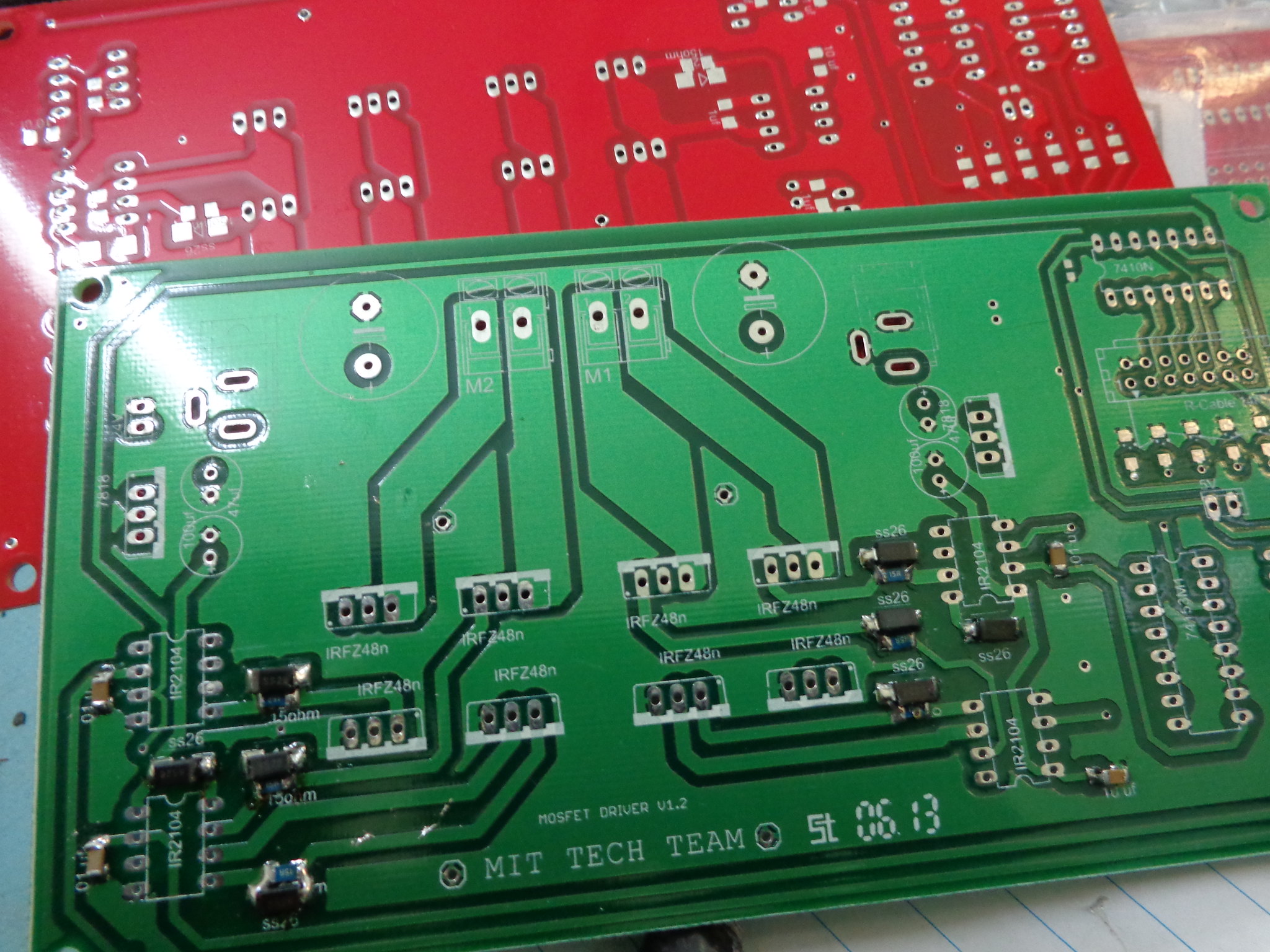
Brand new PCBs:
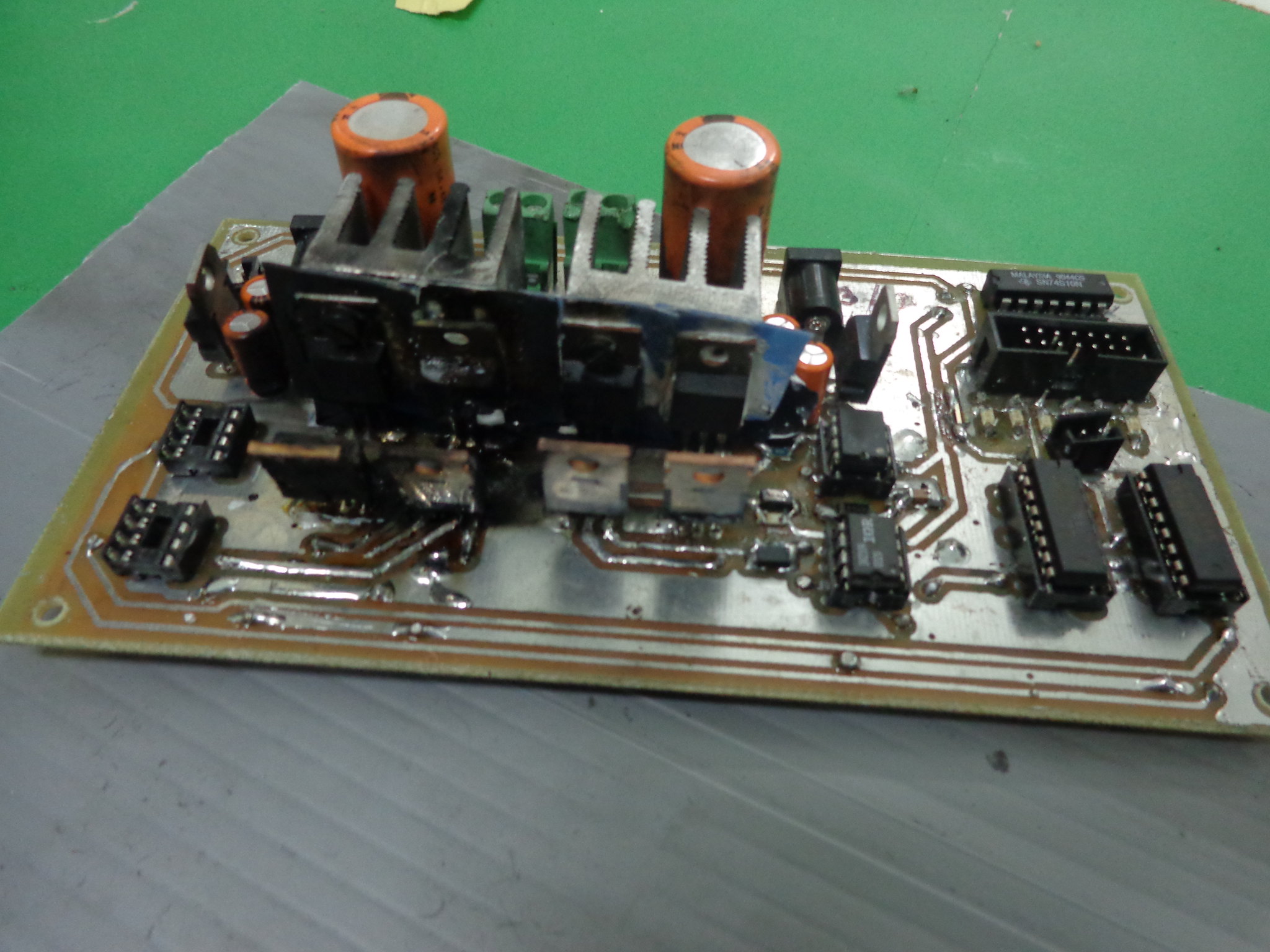
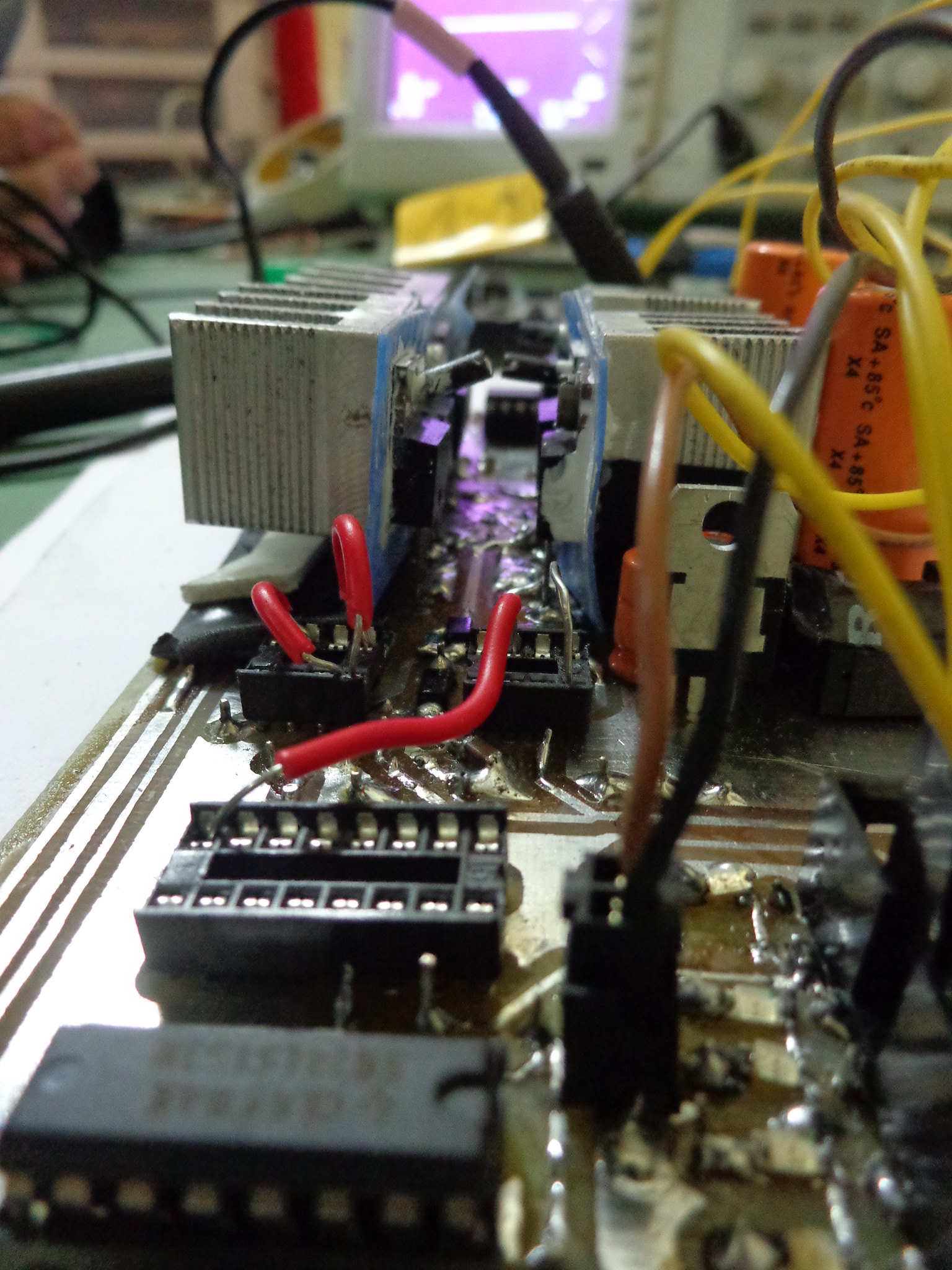
Signal-testing a quick-and-dirty prototype:
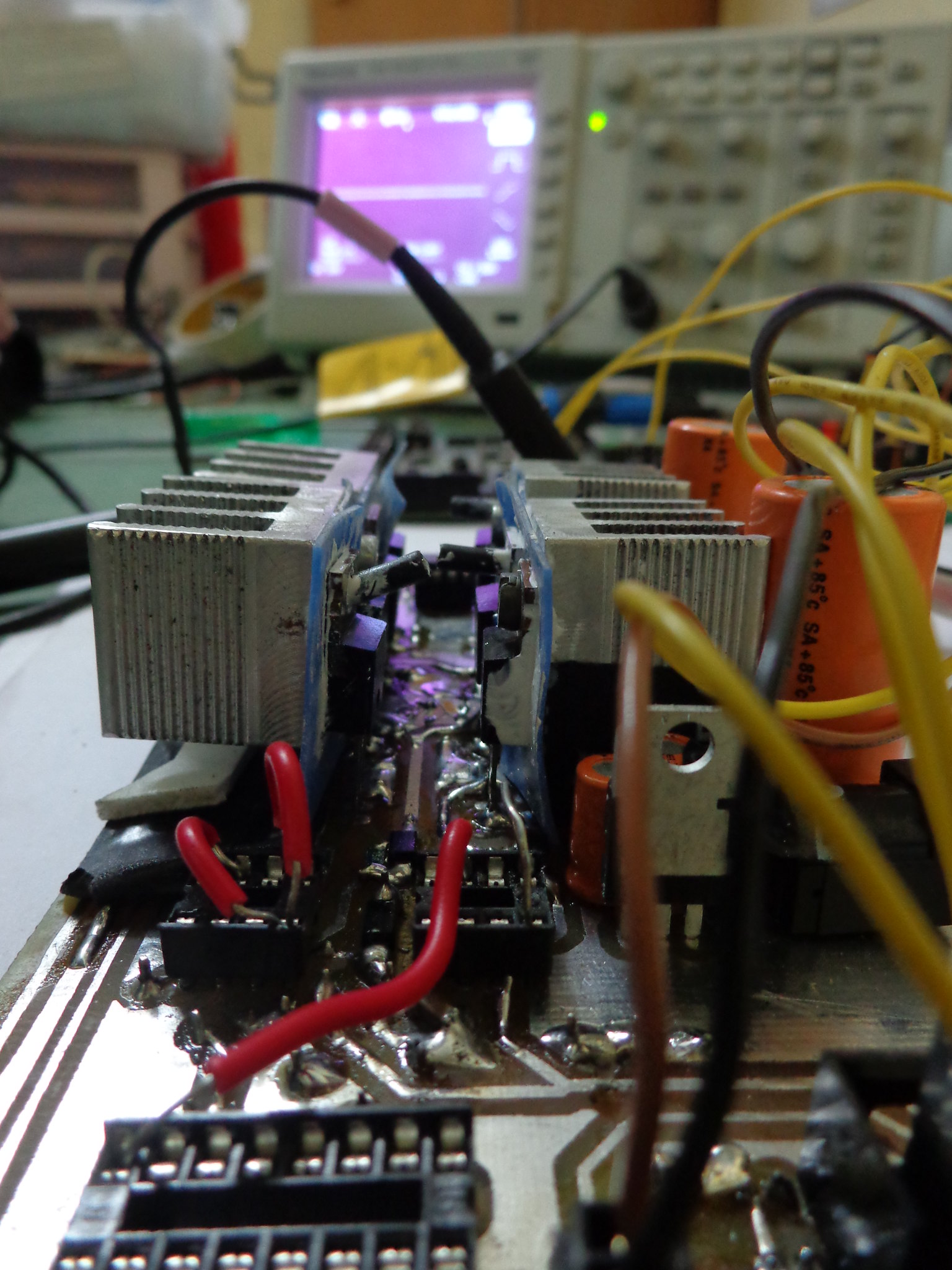
A major malfunction that exploded the MOSFETs in the prototype, which literally caused the bot to catch fire. Took some efforts to extinguish the fire! Fire was so huge that I panicked and asked my buddies to get a bucket of water in that moment. Not to mention that a 24V LiPo battery was still connected. My buddies still make fun of me for that. LOL.